Rehabilitation Robotics Newsletter
Project Showcase
Winter 1995/Spring 1996
ISAC: An Intelligent Robotic-Aid System for the Physically Challenged
K. Kawamura, M. Bishay, and T. Pack
Since 1989, the Intelligent Robotics Lab at Vanderbilt University has conducted
research on a variety of service robots including ISAC (Intelligent Soft
Arm Control). ISAC, in operation since 1991, is a robotic aid system design
to feed the physically challenged. The goal of this research is to develop
service robots which will allow these people to achieve a more independent
lifestyle.
ISAC employs a unique arm. This "soft arm" is actuated by McKibben
pneumatic artificial muscles and protects the user from harm in case of
accidental contact with the robot. An active camera head, mounted on ISAC,
locates objects as well as the user in order to aid with the feeding process.
Key features of ISAC include: intelligent user interface, object recognition,
3-D face tracking, and visual servoing.
The intelligent user interface involves voice I/O using fuzzy commands such
as "move much closer" or "move away." This augments
the conventional interaction in the form of task commands such as "feed
me soup." With fuzzy commands, the user is provided with a more natural
interaction with the system.
Tilting its camera head, ISAC has the ability to recognize objects such
as its feeding utensils on the table. The recognition of feeding utensils
is independent of their size and orientation. The active camera head is
also used to track the user's mouth in 3-D in order to properly feed the
individual. The range of user motion which can be tracked is increased by
using the active camera head.
The final key feature of ISAC is the visual servoing. This module uses the
active camera head and controls the motion of all the arm operations such
as grasping the spoon, dipping the spoon in the bowl, and moving the spoon
to the user's mouth. Visual servoing provides continuous error correction
which is required for feeding the user and grasping the utensils.
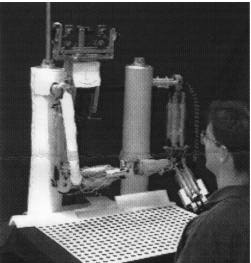
The next generation of ISAC, ISAC II, is currently being developed. As can
be seen in the picture, ISAC II has dual arms which are actuated by flexible,
artificial muscles. One arm has a prosthetic gripper. The other arm has
a unique pneumatic four-fingered gripper which is used for softer tasks.
ISAC II will be capable of performing more complex tasks such as unscrewing
a bottle cap or feeding soup with one hand and pouring a drink with the
other hand. In conclusion, future emphasis will be geared to more intelligent
man-machine interaction where the robot will gesture to the user asking
for more feedback, such as having the robot point to an unknown utensil
on the table and query the user for more information.
To learn more about the project, you may contact the U.S.-Japan Center
for Technology Management, Vanderbilt University, Box 131, Station B, Nashville,
TN 37235; e-mail usjtmp@vuse.vanderbilt.edu.
The Project Showcase is a regular feature of the newsletter in which
a selected project or program is spotlighted. If you are interested in having
your project showcased, contact Tariq
Rahman or Julia Mercier at
ASEL.
![[ASEL]](/images/icons/home.gif)
URL of this document: http://www.asel.udel.edu/
Last updated: September 11, 1996
Copyright © Applied Science and Engineering Laboratories, 1996.